Создание миссии
Создание миссии — центральный процесс платформы Wheelies. Он позволяет спланировать маршрут дрона, настроить параметры полёта и запустить выполнение задачи.
Способы создания
Создать миссию можно несколькими способами:
- Из списка миссий — кнопка «Создать миссию» на странице «Миссии»
- Из шаблона — выбор сохранённого шаблона при создании
- Из ортофотоплана — создание на основе загруженного ортофотоплана
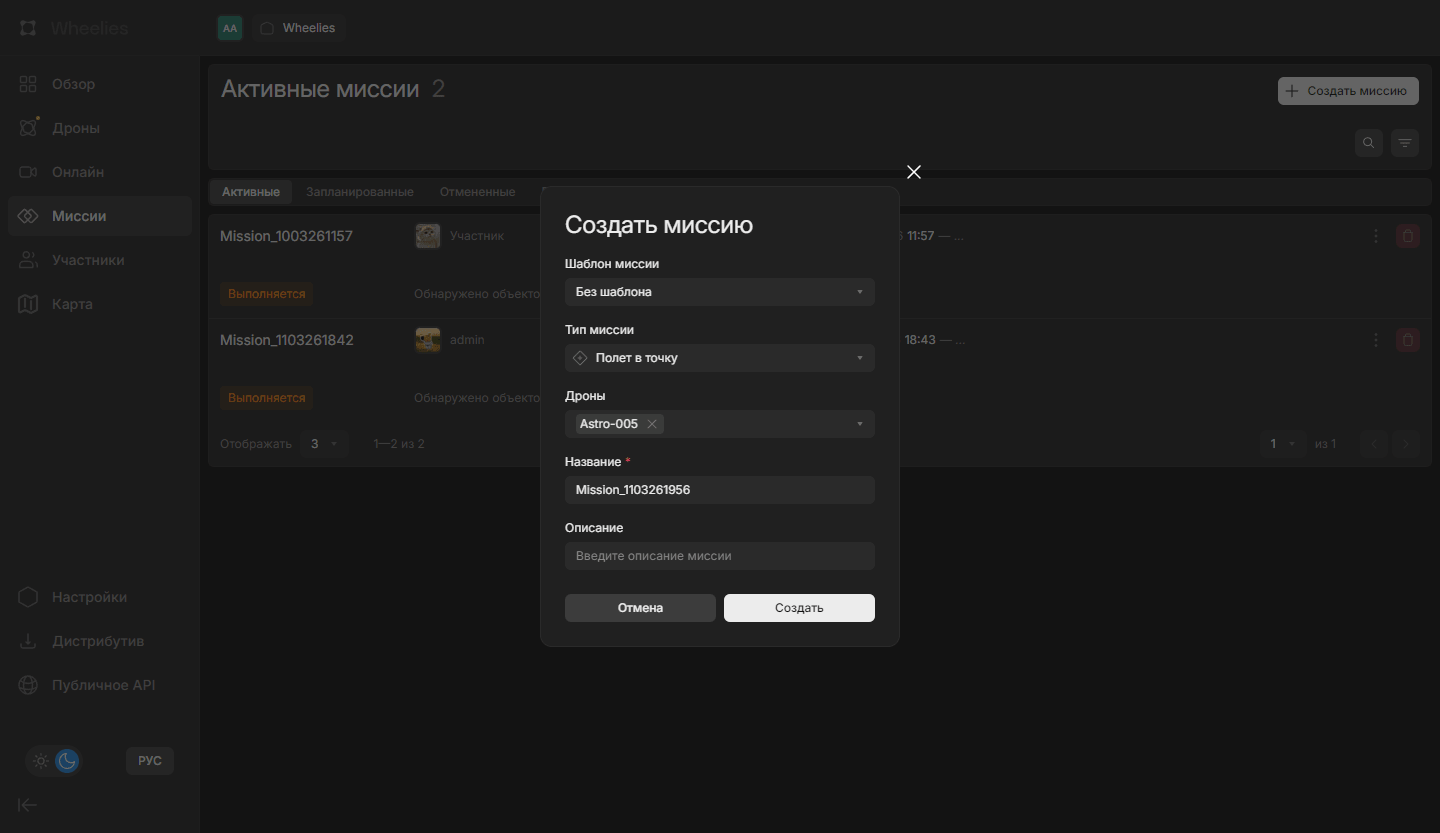
Диалог создания
При нажатии «Создать миссию» открывается диалог:
- Шаблон миссии — готовый шаблон или «Без шаблона».
- Тип миссии — выбор типа команды (обязательное поле).
- Дроны — выбор одного или нескольких дронов.
- Название — заполняется автоматически, доступно для редактирования.
- Описание — пояснение к миссии (необязательно).
Нажмите «Создать» для перехода в конструктор.
Типы команд миссии
Каждая миссия основана на определённом типе команды, который определяет поведение дрона и способ рисования маршрута на карте:
| Команда | Название | Описание | Тип рисования |
|---|---|---|---|
move_to | Движение к заданной точке | Полет в заданную точку | Точка |
by_path | Движение по маршруту | Движение по заданным точкам | Линия |
coverage | Маршрут по области | Движение по траектории, покрывающей область | Полигон |
scan_area | Сканирование области | Сканирование области для генерации 3D-карты | Полигон |
land | Приземлиться | Приземлиться в текущем месте | — |
takeoff | Взлететь на высоту | Взлететь на заданную высоту | — |
manual_control | Ручной контроль | Ручное управление дроном | — |
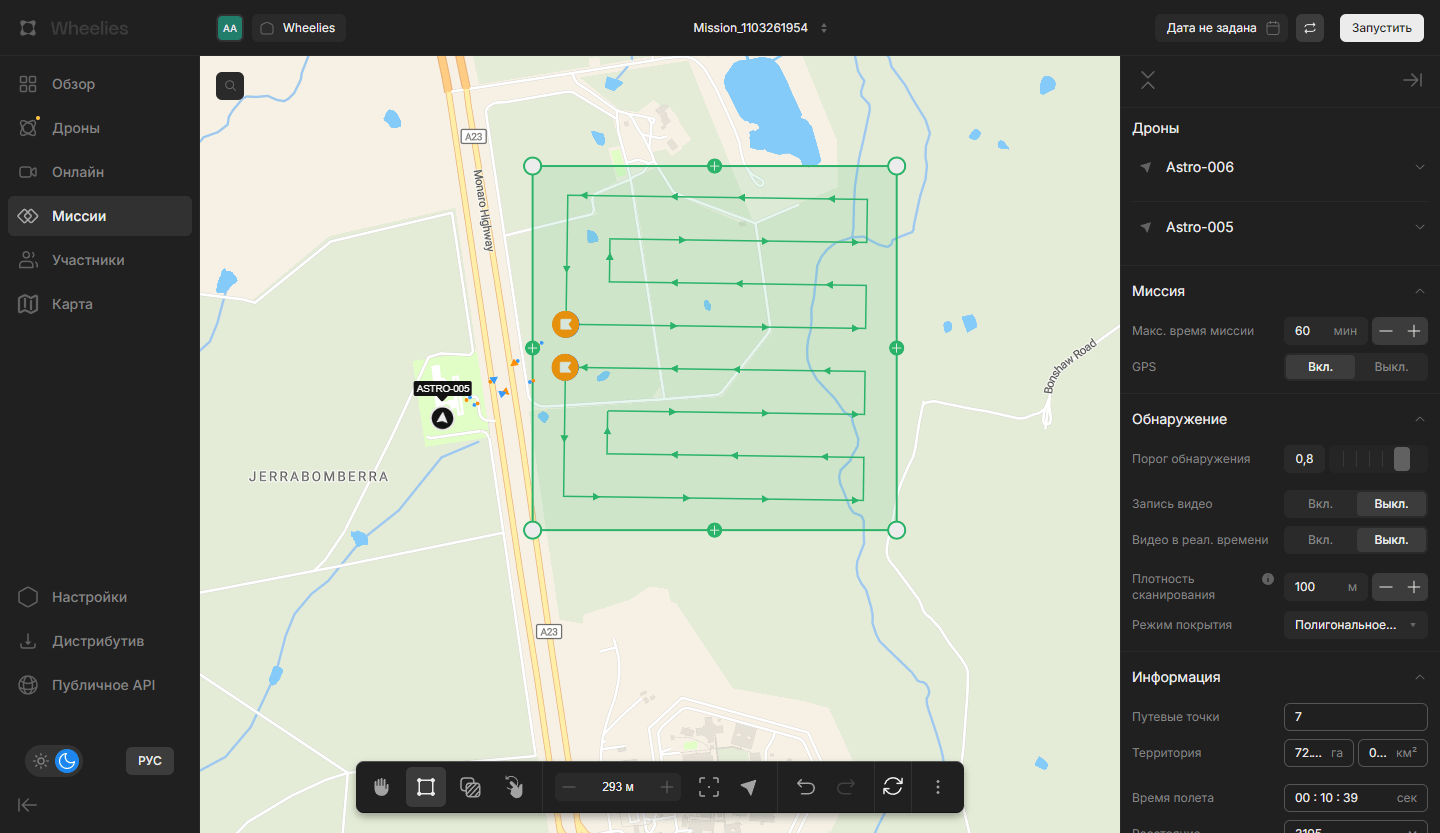
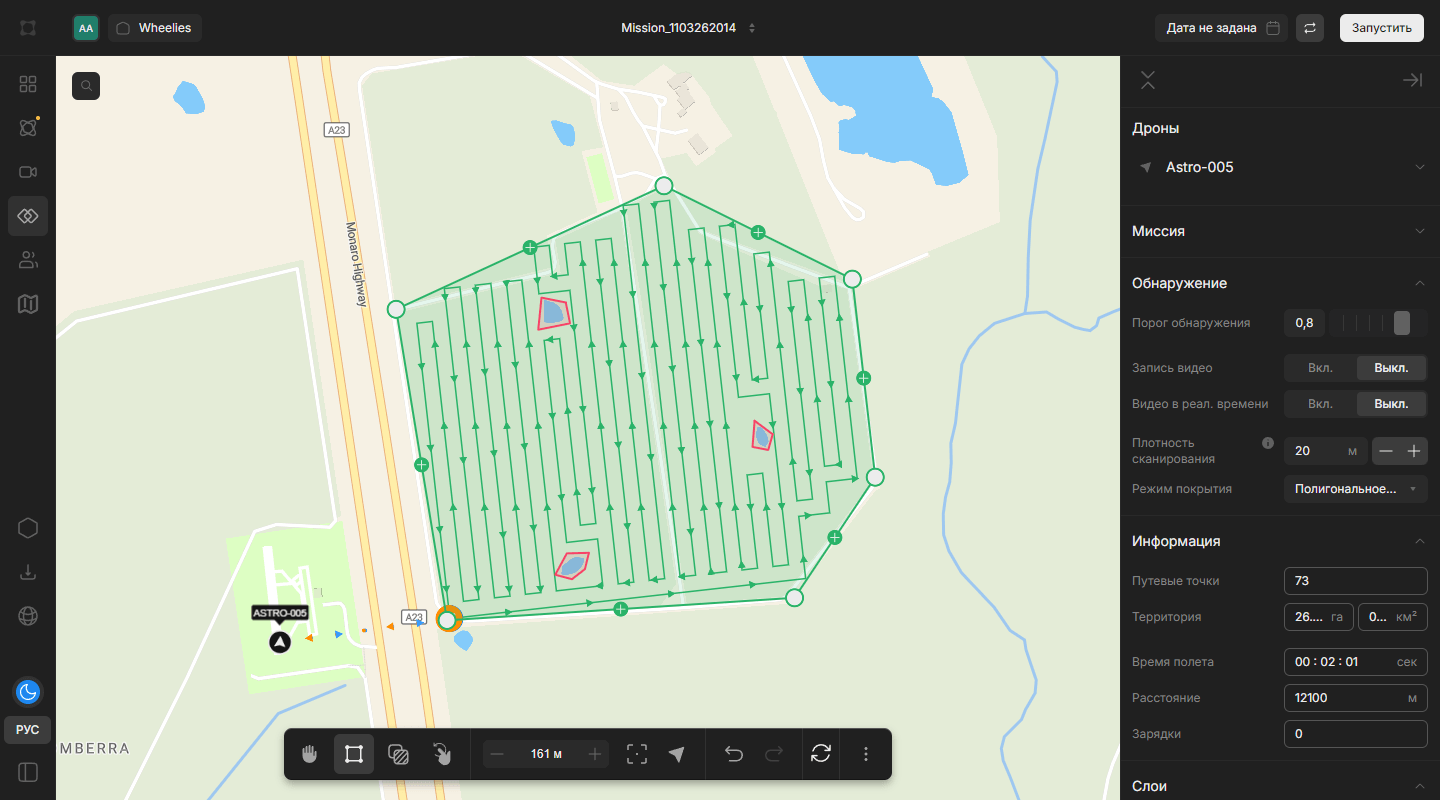
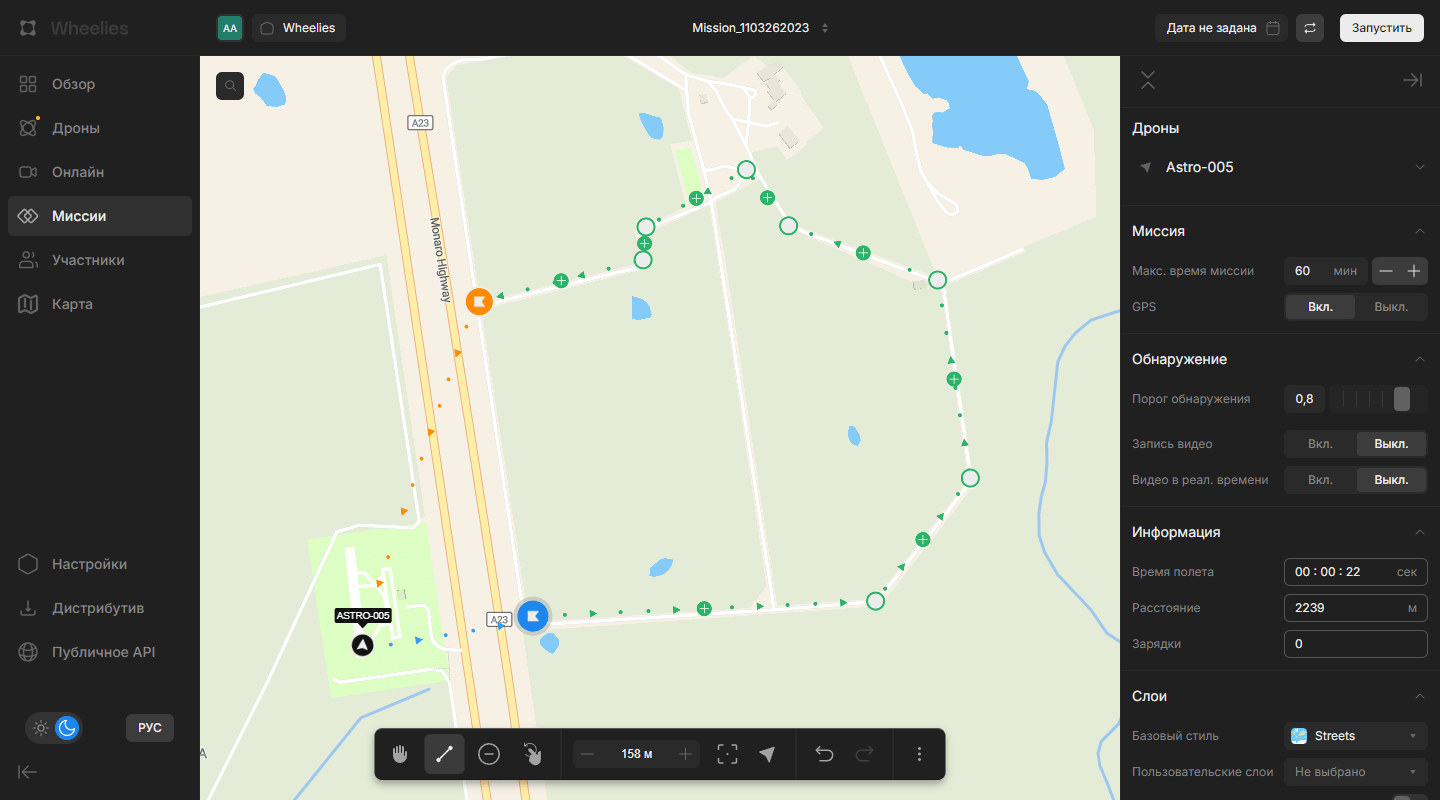
Конструктор миссии
Конструктор состоит из трёх основных блоков:
- Верхняя панель — информация о миссии и управление запуском
- Карта — рабочая область для рисования маршрута
- Правая панель — настройки миссии и дрона
Панель инструментов карты
Инструменты рисования
Набор инструментов зависит от типа выбранной команды:
 — Только перемещение — режим перемещения по карте без редактирования
— Только перемещение — режим перемещения по карте без редактирования — Редактировать область — редактирование полигона (для
— Редактировать область — редактирование полигона (для coverage,scan_area) — Негативная зона — добавление зон исключения внутри полигона (для
— Негативная зона — добавление зон исключения внутри полигона (для coverage,scan_area) — Редактировать точки — редактирование точек маршрута (для
— Редактировать точки — редактирование точек маршрута (для move_to) — Редактировать путь — редактирование линии маршрута (для
— Редактировать путь — редактирование линии маршрута (для by_path) — Удалить выбранную точку — удаление точки из маршрута (для
— Удалить выбранную точку — удаление точки из маршрута (для by_path) — Вращение элементов — масштабирование и вращение полигона/линии
— Вращение элементов — масштабирование и вращение полигона/линии

Управление масштабом
 — Шкала масштаба — текущий масштаб (м / км), кнопки увеличения и уменьшения масштаба
— Шкала масштаба — текущий масштаб (м / км), кнопки увеличения и уменьшения масштаба
Навигация
 — Перейти к размеченной области — центрирование карты на миссии
— Перейти к размеченной области — центрирование карты на миссии — Перейти к дрону — центрирование карты на текущем положении дрона
— Перейти к дрону — центрирование карты на текущем положении дрона
Отмена / Возврат
 — Отменить — отмена последнего действия рисования
— Отменить — отмена последнего действия рисования — Вернуть — возврат отменённого действия
— Вернуть — возврат отменённого действия
Дополнительные действия
 — Обновить пути миссии — пересчёт путей для полигонных миссий
— Обновить пути миссии — пересчёт путей для полигонных миссий — Дополнительное меню — загрузить координаты из файла / изменить координаты выбранного элемента
— Дополнительное меню — загрузить координаты из файла / изменить координаты выбранного элемента
Верхняя панель
Содержит элементы управления миссией:
- Название миссии — название, доступное для редактирования
- Дата и время — выбор даты и времени запуска (планирование)
- Расписание — настройка периодичности повторного выполнения
- Запустить — кнопка запуска миссии

Планирование запуска
По умолчанию миссия запускается немедленно при нажатии кнопки «Запустить». Чтобы запланировать запуск на определённое время, выберите дату и время в верхней панели:
- Нажмите на поле даты в верхней панели.
- Выберите нужную дату — минимальная дата: текущий момент. При выборе даты, которая уже прошла, система автоматически установит текущее время.
- Установите нужное время.
- Нажмите «ОК» для подтверждения.
После выбора даты и времени миссия получает статус «Запланирована». Запланированную миссию можно:
- Изменить — отредактировать параметры до момента запуска
- Отменить — отменить выполнение
- Сбросить дату — убрать запланированное время, чтобы миссия запускалась немедленно
Если дата и время не выбраны, миссия запустится сразу после нажатия кнопки «Запустить».
Повторяющиеся миссии (расписание)
Кнопка расписания (иконка циклических стрелок) открывает настройки периодичности выполнения миссии. Если расписание активно, кнопка подсвечивается.
Настройки расписания
Условие завершения — определяет, когда прекратить повторение:
| Режим | Описание |
|---|---|
| Никогда | Миссия повторяется бессрочно |
| Дата | Повторение прекращается в указанную дату |
| После | Повторение прекращается после заданного количества итераций |
Тип повторения — способ планирования:
| Тип | Описание |
|---|---|
| Еженедельно | Миссия запускается в выбранные дни недели (Пн–Вс). Необходимо выбрать хотя бы один день |
| По времени | Миссия повторяется через заданный интервал (часы и минуты) после завершения предыдущей итерации, в рамках указанного периода активности (например, с 08:00 до 20:00) |
Настройка повторения по времени
При выборе типа «По времени» доступны дополнительные параметры:
- Каждые — интервал между запусками (часы и минуты). Отсчитывается после завершения предыдущей миссии
- Период активности — временное окно, в рамках которого допускается запуск (например,
08:00—20:00). Время начала не может превышать время окончания
Управление расписанием
- Сбросить — удалить настроенное расписание
- Сохранить — применить расписание к миссии
При запуске миссии с расписанием открывается диалог подтверждения, в котором перечислены дроны, задействованные в повторяющейся миссии.
Для уже запущенной повторяющейся миссии параметры расписания доступны только для просмотра и не подлежат редактированию.
Правая панель
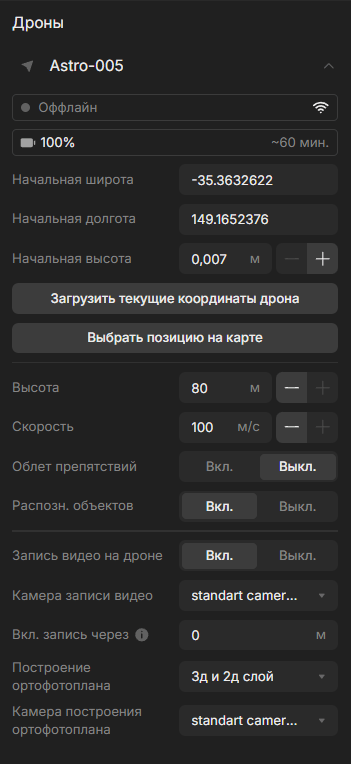
Секция «Дроны»
Для каждого выбранного дрона отображается отдельный раскрывающийся блок с индивидуальными параметрами.
Состояние дрона
- Статус подключения — текущее состояние связи с дроном
- Уровень заряда батареи — процент заряда и время полёта на одной батарее
Начальная позиция
- Начальная широта — координата широты точки старта (поддерживает различные форматы координат)
- Начальная долгота — координата долготы точки старта
- Начальная высота — высота взлёта (м), ограничена максимальной высотой дрона
- Загрузить текущие координаты дрона — автоматическое заполнение координат из телеметрии дрона
- Выбрать позицию на карте — установка начальной точки кликом по карте
Параметры полёта
- Высота — высота полёта (м) с ограничением по максимальной высоте дрона
- Скорость — скорость полёта (м/с) с ограничением по максимальной скорости дрона
- Обход препятствий — включение/отключение системы автоматического обхода препятствий
- Распознавание объектов — включение/отключение AI-детекции объектов во время полёта
Запись видео на дроне
- Запись видео — включение/отключение записи видео непосредственно на дроне
- Камера для записи — выбор камеры из доступных камер дрона
- Запись активируется от — дистанция (м) от зоны миссии, при достижении которой начинается запись
Построение ортофотоплана
Настройка доступна для команд с полигоном (coverage, scan_area) и облёта точек (by_path):
- Построение ортофотоплана — выбор режима:
- Выкл — ортофотоплан не создаётся
- Только 2D — создание 2D-ортофотоплана
- 3D и 2D — создание 3D-модели и 2D-ортофотоплана
- Камера для ортофотоплана — выбор камеры, с которой будут сниматься кадры для построения
Для получения качественного ортофотоплана рекомендуется использовать команду «Сканирование области» (scan_area) с достаточной плотностью сканирования. Подробнее — в разделе Ортофотоплан.
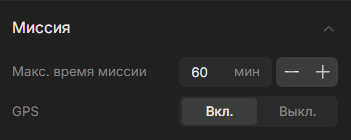
Секция «Миссия»
| Параметр | Описание |
|---|---|
| Максимальное время | Ограничение времени выполнения миссии в минутах (по умолчанию 60 мин). Минимальное значение — 0.1 мин |
| Режим GPS | Включение или отключение GPS-навигации |
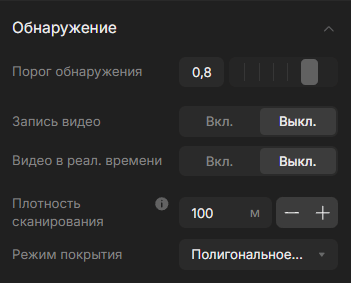
Секция «Обнаружение»
| Параметр | Описание |
|---|---|
| Порог обнаружения | Порог срабатывания детекции (от 0 до 1). Чем выше значение, тем точнее, но реже срабатывание |
| Запись видео | Включение/отключение записи видеопотока |
| Видеопоток в реальном времени | Включение/отключение трансляции видео с дрона |
Для полигонных команд (coverage, scan_area) доступны дополнительные параметры:
| Параметр | Описание |
|---|---|
| Плотность сканирования | Расстояние между линиями облёта (м). Чем меньше значение, тем детальнее покрытие. Минимум — 1 м |
| Режим покрытия | Способ построения маршрута: «Покрытие полигона» — маршрут строго внутри полигона; «Лучшее покрытие» — оптимальное покрытие с возможным выходом за границы |
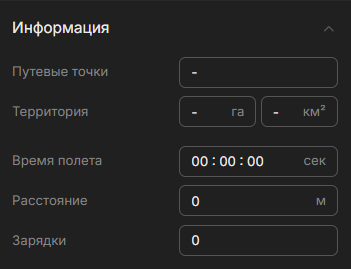
Секция «Информация»
Рассчитанные системой параметры полёта. Данный блок недоступен для редактирования.
| Параметр | Описание |
|---|---|
| Путевые точки | Количество точек в маршруте (для полигонных команд) |
| Территория | Площадь области в гектарах и квадратных километрах (для полигонных команд) |
| Время полёта | Расчётное время выполнения миссии |
| Расстояние | Общая длина маршрута (м) |
| Зарядов батареи | Расчётное количество необходимых зарядов батареи |
Секция «Слои»
Управление отображением слоёв на карте: включение и отключение пользовательских слоёв, ортофотопланов и других типов данных.
Секция «Настройки»
Дополнительные параметры и базовые стили карты.
В АРМ-версии платформы доступны только стили Streets и Bright. В облачной версии дополнительно доступны Maptiler Streets и Maptiler OSM.
Режим ручного управления
При выборе команды manual_control конструктор переключается в режим ручного управления. Инструменты рисования на карте скрываются.
Запуск миссии
Нажмите кнопку «Запустить» на верхней панели для отправки дрона на миссию. После запуска миссия появится в списке активных миссий.
Ортофотоплан
Ортофотоплан — это геопривязанное изображение местности, собранное из множества снимков, сделанных дроном во время полёта. Используется для детального анализа территории, измерений и визуального контроля.
Как создать ортофотоплан
- Создайте миссию с типом команды «Сканирование области» (
scan_area) или «Облет области» (coverage). Также поддерживается «Облет точек» (by_path). - Нарисуйте область на карте, которую необходимо отснять.
- Настройте плотность сканирования в секции «Обнаружение» — чем меньше значение, тем выше детализация ортофотоплана, но дольше полёт.
- В секции «Дроны» включите «Построение ортофотоплана»:
- Только 2D — для плоского ортофотоплана
- 3D и 2D — для 3D-модели и ортофотоплана
- Выберите камеру для съёмки ортофотоплана.
- Запустите миссию.
После завершения миссии ортофотоплан будет автоматически построен и станет доступен в медиафайлах дрона и на странице «Карта».
Для наилучшего качества ортофотоплана рекомендуется:
- Использовать плотность сканирования 5–15 м в зависимости от высоты полёта
- Выбирать камеру с наибольшим разрешением
- Выполнять полёт при хорошем освещении